
北京渡众自动驾驶教学实训平台,助力智能网联汽车人才培养

北京渡众自动驾驶教学实训平台,是我司推出的一款针对高校用户用于教学、科研、竞赛的智能移动平台,帮助职校、高校学生实验室搭建好车联网系统教具,支持职校、高校及研究院汽车智能技术专业,且教程教具将根据前沿科技不断更新迭代。适用于自动驾驶、智能网联、智能驾驶、无人驾驶等主题课程。
一、产品介绍
1、DZ20自主导航移动机器人


DZ20自主导航移动机器人大小适中,可以灵活的部署在机器人教学实验室。能方便的与多种机械臂和传感器进行集成,具有良好的可拓展性。支持开源ROS机器人操作系统,同时提供一系列DEMO进行由浅入深的学习ROS自主导航;同时提供相应的文档教程与视频教程。
自主导航实训沙盘:V2X车路协同系统、智能小车、智能路侧设备等,详细介绍如下!
V2X车路协同系统
车路协同系统是该示教沙盘的核心功能,它可以全面管理和控制每辆车的实时状态信息、智能路网系统信息和智能路边设备信息。组成部分可以分为三大部分:自动驾驶系统、车路协同系统、智能云控&远程驾驶系统,三者构成智慧交通场景下协同感知与协同决策的闭环。
它包括用户管理、高精度地图加载、智能车辆加载、车辆路径在线规划、车辆信息实时显示、单车传感器数据实时显示、路边设备在线控制、远程驾驶等。
自动驾驶系统,可实现单车智能的同时,还可以实现多车编队行驶。小车搭配激光雷达、惯性导航、里程计、自动驾驶计算单元等传感器,应用SLAM技术,在高精地图基础上,实现自动驾驶功能。
自动驾驶功能系统组成:智能停车系统、智能信号灯系统、交通视频监控系统、车辆定位系统、路线自动导航系统、主视角行车视频系统、智能车辆等无人驾驶实训展示系统。沙盘智能中控系统可完成沙盘整体运行控制以及教学二次开发。


车路协同云控系统,车路协同云控应用主要分为超视距感知下预警与引导和协同决策应用两大类功能应用。
其中超视距感知下预警与引导应用通过云控路侧感知基站与车云通信实现的车路协同感知,及驾驶级实时的局部动态地图融合更新,为各级自动驾驶提供实时超视距广域精细感知信息,进而实现稳定与高适用性的多重预警与引导类网联应用,帮助车辆可靠发现危险,优化驾驶行为。


远程驾驶系统,北京渡众机器人自主研发的远程5G平行驾驶系统,通过方向盘远程遥控车辆前进,转弯等动作。通过wifi实时传输视频信息。并且可以一键切换到自动驾驶模式。
以上系统涉及交通控制、交通管理、车路协同、交通安全、自动驾驶等应用,为高校、中高职院校的交通运输、自动化、软件工程、通讯工程、车辆工程等专业方向开展相关前沿学科建设、专业建设提供实验平台和教学指导。


智能路边设备
车路协调是无人驾驶系统发展的必然趋势,智能路边设备可以使无人驾驶车辆在复杂的交通流中具有监督、协调和遵守规则的能力。
2、巡检机器人


巡检机器人集激光雷达、RTK等传感器于一体,基于ROS,纯电线控底盘,四驱差速转向,实现了特定场景下的无人驾驶能力。高扩展硬件结构平台,自重30kg,载重40KG,合理规划传感器可选位置。包含工控机、GPS、IMU、激光雷达,深度相机、摄像头等常用配置硬件,充分优化硬件集成应用。多冗余安全机制设计,智能电量监控,配备车辆遥控器、急停系统与电量监控。
二、功能实现
1、高精地图:测绘级高精地图
渡众机器人自主研发的基于多传感器融合的高精地图制作,可灵活稳定的切换室内/室外场景,高精地图精度<5cm.学生可学习高精地图的制作过程、制作原理及学习代码的调试、运行。


2、自主定位和导航
我司自主研发的离线定位并能根据高精地图生成想要到达的目的地,精度<5cm,并成功应用于消防领域与自主导航机器人或自动驾驶乘用车上。
学生可学习了解自主导航定位的原理和代码实现,了解数据处理模块、环境感知模块、运动执行模块三大模块知识,学习多融合传感器感知方法。


3、自由路径规划与路网规划
可根据任务点输出全局路径规划和局部路径规划路线,支持自由导航,在建图范围内的任意点之间可导航。学生可以了解学习机器人所需要的路径规划算法。
4、感知与避障
使机器人具备自主感知能力,遇到障碍物能够自动避障或绕障,自主更新局部路径规划并寻找可通行的路径,可帮助学生了解学习基于激光雷达和视觉传感器(摄像头)的感知与避障。
5、远程管控
可根据需求进行定制化开发,设定车载端与主控端的通信协议,实现主控端对车载端的远程管控。
6、支持多种底盘通信协议开发
可根据用户已也有底盘协议进行定制化开发,并可根据需要做出调整和优化,实现底盘及机器人相关信息的实时传送。
7、传感器标定
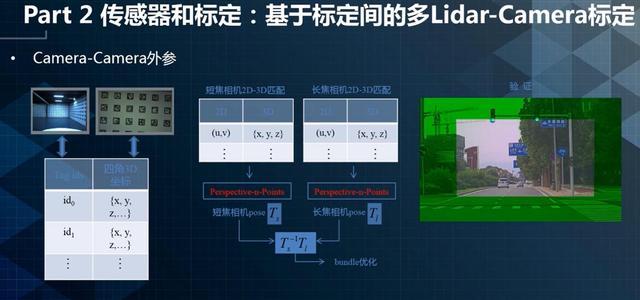

传感器标定是自动驾驶的基本需求,一个车上装了多个/多种传感器,而它们之间的坐标关系是需要确定的。我司可提供传感器标定方案与算法。
三、应用案例
渡众机器人为北京某高校汽车实训室,基于V2X示教沙盘搭建教学实训环境,智能微缩车交通功能场景模块,可满足模拟开发测试、教学研究等需求。
注:本文部分内容来源于网络,如有侵权,请联系删除。