- 0
贾佳亚等提出Fast Point R-CNN,利用点云快速高效检测3D目标
选自arXiv
作者:Yilun Chen、Shu Liu、Xiaoyong Shen、Jiaya Jia
机器之心编译
参与:韩放、一鸣
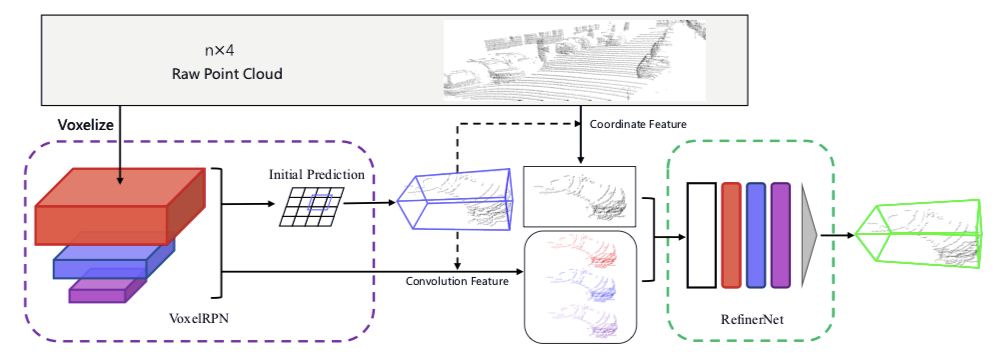
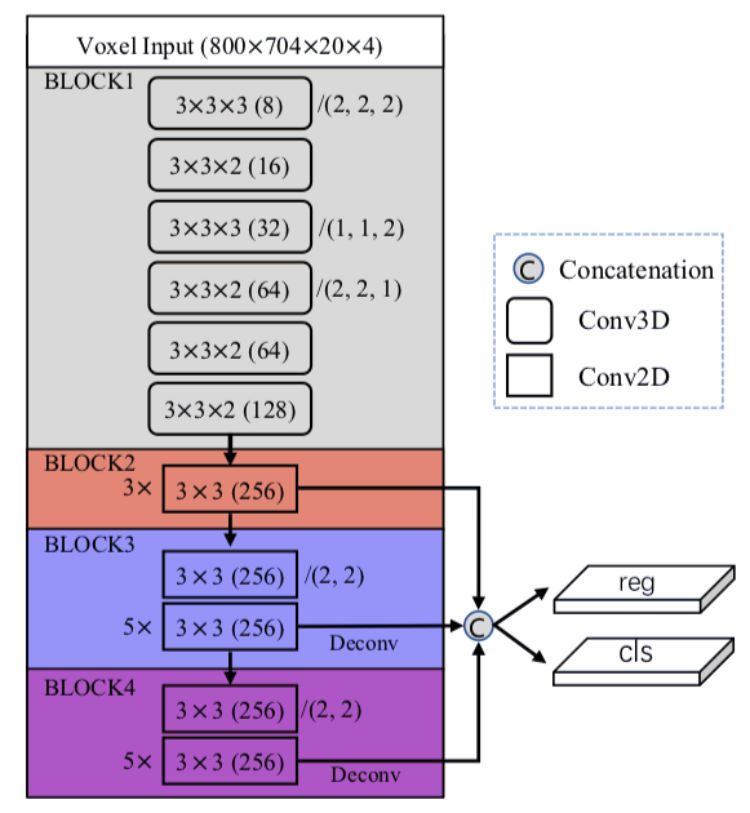
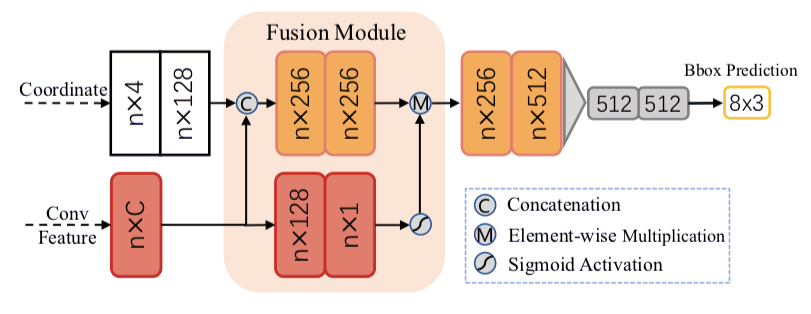
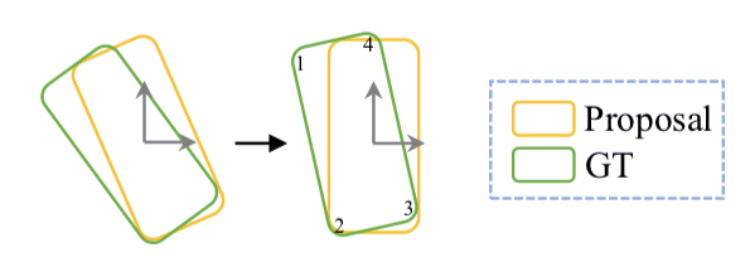
本文提出了一个统一、高效且有效的,基于点云的三维目标检测框架。其两阶段方法采用体素表示和原始点云数据并充分利用了它们的优势。第一阶段的网络,以体素表示为输入,只包含轻量卷积运算,产生少量高质量的初始预测。初始预测中每个点的坐标和索引卷积特征与注意机制有效融合,既保留了准确的定位信息,又保留了上下文信息。第二阶段研究内部点及其融合特征,以进一步完善预测。该方法在 KITTI 数据集上进行了评估,包括 3D 和鸟瞰图(BEV)检测,以 15FPS 的检测速率达到了最先进的水平。
 论文地址:
https://arxiv.org/abs/1908.02990v1
论文地址:
https://arxiv.org/abs/1908.02990v1
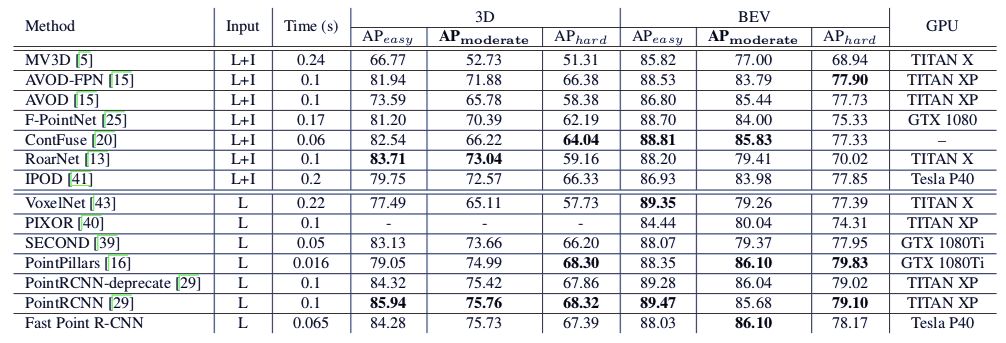
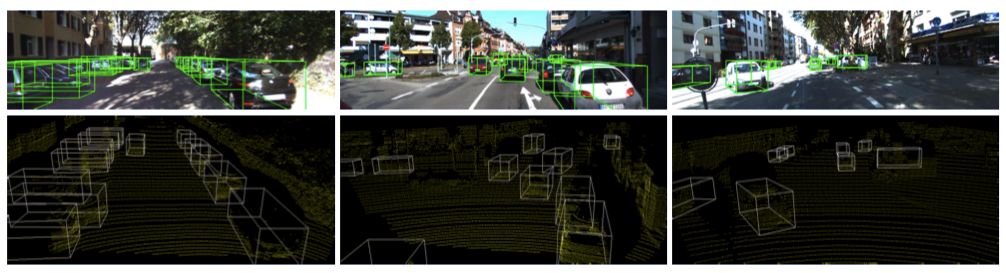
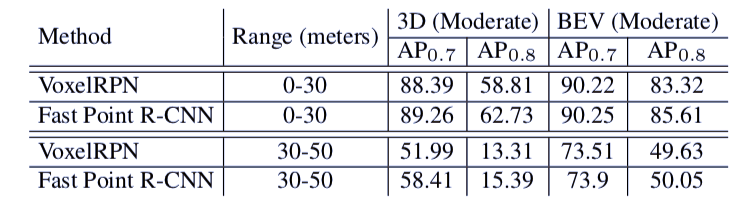
实验结果
登录查看更多
相关内容

点云
关注
47
根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity)。
根据摄影测量原理得到的点云,包括三维坐标(XYZ)和颜色信息(RGB)。
结合激光测量和摄影测量原理得到点云,包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB)。
在获取物体表面每个采样点的空间坐标后,得到的是一个点的集合,称之为“点云”(Point Cloud)
【CVPR2020】通过获取高质量的关键点对来提升目标检测性能
专知会员服务
42+阅读 · 2020年6月30日
【CVPR2020-Facebook】从检测到3D目标,FroDO: From Detections to 3D Objects
专知会员服务
30+阅读 · 2020年5月12日
3D目标检测进展综述
专知会员服务
188+阅读 · 2020年4月24日
YOLOv4 重磅来袭!俄罗斯小哥带来新一代快速高效检测器
专知会员服务
31+阅读 · 2020年4月24日
CVPR2020 | 商汤-港中文等提出PV-RCNN:3D目标检测新网络
专知会员服务
43+阅读 · 2020年4月17日
【CVPR2020】实例感知、上下文聚焦和内存有效的弱监督目标检测,Instance-aware, Context-focused, and Memory-efficient Weakly Supervised Object Detection
专知会员服务
33+阅读 · 2020年4月11日
【CVPR2020-谷歌】多目标(车辆)跟踪与检测框架 RetinaTrack
专知会员服务
44+阅读 · 2020年4月10日
【CVPR2020-香港中文大学】PointGroup:用于3D实例分割的双设置点分组,PointGroup: Dual-Set Point Grouping for 3D Instance Segmentation
专知会员服务
11+阅读 · 2020年4月6日
【CVPR2020-北京大学】FocalMix:用于3D医学图像检测的半监督学习
专知会员服务
54+阅读 · 2020年3月23日
[CVPR 2020 Oral-牛津] RandLA-Net:大场景三维点云语义分割新框架
专知会员服务
24+阅读 · 2020年3月15日
已删除
将门创投
5+阅读 · 2019年9月10日
【泡泡图灵智库】DenseFusion:基于迭代密集融合的6D目标姿态估计
泡泡机器人SLAM
16+阅读 · 2019年9月3日
何恺明团队开源3D目标检测新框架VoteNet:模型更简单、效率更高
AI前线
15+阅读 · 2019年9月1日
【泡泡点云时空】PointPillars:点云物体检测的快速编码器
泡泡机器人SLAM
7+阅读 · 2019年6月23日
已删除
将门创投
8+阅读 · 2019年6月13日
【泡泡点云时空】FlowNet3D:学习三维点云中的场景流
泡泡机器人SLAM
41+阅读 · 2019年5月19日
【泡泡点云时空】LaserNet:一种用于自动驾驶的高效三维目标概率检测器
泡泡机器人SLAM
5+阅读 · 2019年5月12日
何恺明团队最新研究:3D目标检测新框架VoteNet,直接处理点云数据,刷新最高精度
人工智能前沿讲习班
5+阅读 · 2019年5月2日
何恺明团队最新研究:3D目标检测新框架VoteNet,两大数据集刷新最高精度
新智元
8+阅读 · 2019年4月25日
CVPR 2019 | PointConv:在点云上高效实现卷积操作
机器之心
10+阅读 · 2019年4月21日
Look-into-Object: Self-supervised Structure Modeling for Object Recognition
Arxiv
15+阅读 · 2020年3月31日
Mesh R-CNN
Arxiv
4+阅读 · 2019年6月6日
Stereo R-CNN based 3D Object Detection for Autonomous Driving
Arxiv
5+阅读 · 2019年2月26日
3D Backbone Network for 3D Object Detection
Arxiv
10+阅读 · 2019年1月24日
Pooling Pyramid Network for Object Detection
Arxiv
6+阅读 · 2018年7月9日
Auto-Context R-CNN
Arxiv
4+阅读 · 2018年7月8日
Convolutional CRFs for Semantic Segmentation
Arxiv
8+阅读 · 2018年5月15日
Fast Feature Extraction with CNNs with Pooling Layers
Arxiv
5+阅读 · 2018年5月8日
3D-SSD: Learning Hierarchical Features from RGB-D Images for Amodal 3D Object Detection
Arxiv
8+阅读 · 2018年2月21日
Mask R-CNN
Arxiv
7+阅读 · 2018年1月24日
相关主题
点云 贾佳亚
贾佳亚 R-CNN
R-CNN相关VIP内容
【CVPR2020】通过获取高质量的关键点对来提升目标检测性能
专知会员服务
42+阅读 · 2020年6月30日
【CVPR2020-Facebook】从检测到3D目标,FroDO: From Detections to 3D Objects
专知会员服务
30+阅读 · 2020年5月12日
3D目标检测进展综述
专知会员服务
188+阅读 · 2020年4月24日
YOLOv4 重磅来袭!俄罗斯小哥带来新一代快速高效检测器
专知会员服务
31+阅读 · 2020年4月24日
CVPR2020 | 商汤-港中文等提出PV-RCNN:3D目标检测新网络
专知会员服务
43+阅读 · 2020年4月17日
【CVPR2020】实例感知、上下文聚焦和内存有效的弱监督目标检测,Instance-aware, Context-focused, and Memory-efficient Weakly Supervised Object Detection
专知会员服务
33+阅读 · 2020年4月11日
【CVPR2020-谷歌】多目标(车辆)跟踪与检测框架 RetinaTrack
专知会员服务
44+阅读 · 2020年4月10日
【CVPR2020-香港中文大学】PointGroup:用于3D实例分割的双设置点分组,PointGroup: Dual-Set Point Grouping for 3D Instance Segmentation
专知会员服务
11+阅读 · 2020年4月6日
【CVPR2020-北京大学】FocalMix:用于3D医学图像检测的半监督学习
专知会员服务
54+阅读 · 2020年3月23日
[CVPR 2020 Oral-牛津] RandLA-Net:大场景三维点云语义分割新框架
专知会员服务
24+阅读 · 2020年3月15日
相关资讯
已删除
将门创投
5+阅读 · 2019年9月10日
【泡泡图灵智库】DenseFusion:基于迭代密集融合的6D目标姿态估计
泡泡机器人SLAM
16+阅读 · 2019年9月3日
何恺明团队开源3D目标检测新框架VoteNet:模型更简单、效率更高
AI前线
15+阅读 · 2019年9月1日
【泡泡点云时空】PointPillars:点云物体检测的快速编码器
泡泡机器人SLAM
7+阅读 · 2019年6月23日
已删除
将门创投
8+阅读 · 2019年6月13日
【泡泡点云时空】FlowNet3D:学习三维点云中的场景流
泡泡机器人SLAM
41+阅读 · 2019年5月19日
【泡泡点云时空】LaserNet:一种用于自动驾驶的高效三维目标概率检测器
泡泡机器人SLAM
5+阅读 · 2019年5月12日
何恺明团队最新研究:3D目标检测新框架VoteNet,直接处理点云数据,刷新最高精度
人工智能前沿讲习班
5+阅读 · 2019年5月2日
何恺明团队最新研究:3D目标检测新框架VoteNet,两大数据集刷新最高精度
新智元
8+阅读 · 2019年4月25日
CVPR 2019 | PointConv:在点云上高效实现卷积操作
机器之心
10+阅读 · 2019年4月21日
相关论文
Look-into-Object: Self-supervised Structure Modeling for Object Recognition
Arxiv
15+阅读 · 2020年3月31日
Mesh R-CNN
Arxiv
4+阅读 · 2019年6月6日
Stereo R-CNN based 3D Object Detection for Autonomous Driving
Arxiv
5+阅读 · 2019年2月26日
3D Backbone Network for 3D Object Detection
Arxiv
10+阅读 · 2019年1月24日
Pooling Pyramid Network for Object Detection
Arxiv
6+阅读 · 2018年7月9日
Auto-Context R-CNN
Arxiv
4+阅读 · 2018年7月8日
Convolutional CRFs for Semantic Segmentation
Arxiv
8+阅读 · 2018年5月15日
Fast Feature Extraction with CNNs with Pooling Layers
Arxiv
5+阅读 · 2018年5月8日
3D-SSD: Learning Hierarchical Features from RGB-D Images for Amodal 3D Object Detection
Arxiv
8+阅读 · 2018年2月21日
Mask R-CNN
Arxiv
7+阅读 · 2018年1月24日
Top