变电站一键顺控视频双确认系统的制作方法
1.本发明属于变电站监控技术领域,特别涉及变电站一键顺控视频双确认系统。
背景技术:
2.天然气输配系统提供应急储备、液化和气化调峰功能,对保障城市的燃气储备与安全稳定供气具有重要意义。因库区储存介质主要为液态天然气,其物料具有易燃性、化学性爆炸、物理性爆炸、窒息、冻伤等危险性,且地理位置毗邻公园等人流复杂区域,存在较大的火灾风险和外来人员周界入侵风险隐患。防区外飞鸟、杂树较多,误报率较高,为防止频繁误报导致操作人员出现懈怠心理,提升周界入侵报警准确率,需要防止外来人员入厂破坏。为防止入厂人员出现懈怠心理,未按要求穿戴安全帽及工作服,安需要检测入厂人员是否按规定穿戴安全帽、工作服、工作鞋,杜绝引火源,防止意外发生。为防止入厂人员存在懈怠侥幸心理,违规吸烟和打电话,需要杜绝引火源,防止意外发生等,以提升变电站的安全性。
技术实现要素:
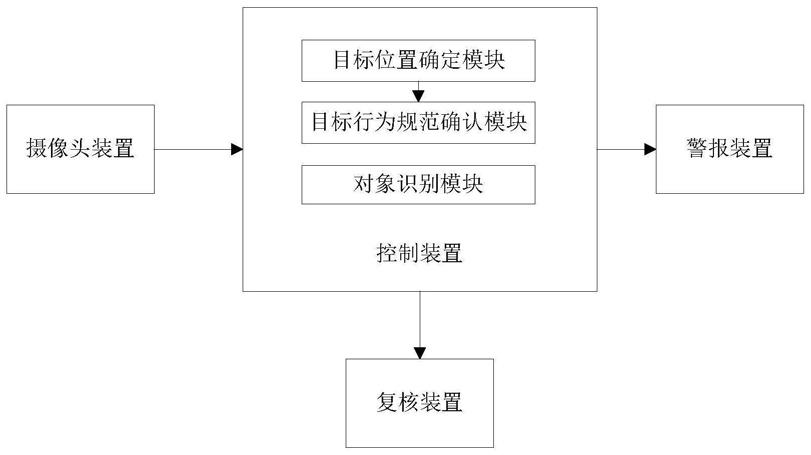
3.本发明公开变电站一键顺控视频双确认系统,包括摄像头装置、控制装置和警报装置;所述控制装置包括目标位置确定模块、目标行为规范确认模块和对象识别模块;所述目标位置确定模块用于确定目标是否停留在指定区域/是否离开指定区域;所述目标行为规范确认模块用于接收所述目标位置确认模块确定目标在指定区域后,通过深度学习实现自动检测目标物体,确定目标行为是否规范,如果不规范,则发送信号给所述警报装置触发报警;所述对象识别模块基于级联模型实现对象的安全识别。
4.所述的变电站一键顺控视频双确认系统,所述目标位置确定模块接收所述摄像头装置采集的视频数据,采用滑动窗口平滑统计方法判断目标位置,如果视频帧内出现目标,则认为目标存在;反之,如果视频帧内没有目标,则认为目标离开;通过滑动窗口平滑统计方法,记录最近若干帧内目标物体出现情况,仅当这些帧内检测到目标的帧的数量超出一定比例后,才认为目标存在,当检测到目标的帧的数量低于一定比例后,认为目标离开,能够避免个别帧的错误识别结果影响程序判断。
5.所述的变电站一键顺控视频双确认系统,所述目标行为规范确认模块通过采集槽车、工作人员、防滑垫、警示牌图像,形成数据集,使用深度学习目标检测方法训练,得到检测出槽车、工作人员、防滑垫、警示牌物体的深度学习模型;然后,设计行为规范检测算法,当检测到槽车进入指定区域后,开始检测工作人员、防滑垫、警示牌物体,如果检测到目标物体出现在指定区域,作业完成;如果在规定时间内没有检测到目标物体,可以认为没有按照规范完成作业,发送报警信号给所述警报装置,触发报警。
6.所述的变电站一键顺控视频双确认系统,所述对象识别模块通过级联模型降低因为场站内部设备、背景造成的对象识别的误报,所述级联模型包括第一级模型和第二级模型,所述第一级模型首先输入到一个轻量而快速的单阶段目标检测模型(yolov4
‑
tiny),该
模型只检测画面当中是否有人出现,一旦检测到有人出现,算法将会对画面当中该人体的区域裁剪下来,然后把这块裁剪出来的区域送到第二级模型;第二级模型收到人体剪裁区域后,整体被放大到416x416像素大小,再进行目标检测;同构第一级模型就排除了背景的干扰,让模型的注意力集中在人的身上,此时能极大地降低误报;另外把人体区域剪裁出来后进行了放大,能够更好的看清楚人体的细节。
7.所述的变电站一键顺控视频双确认系统,还包括对报警信息进行校核的复核装置,所述复核装置包括四驱移动模块、摄像头、控制器、位置校验模块和数据收发模块;所述复核装置在所述报警装置发出报警信号一定时间内,再次确认是否仍然存在未按照规范的执行的操作,如果存在,在启动所述复核装置,所述复核装置在收到启动信号,开启复核;所述四驱移动模块包括四个驱动器、四个检测器、四个车轮和与检测器连接的信息处理装置,所述检测器用于检测车轮移动的位置信息,所述信息处理装置用于对检测器检测的信号进行处理,以确定四驱的两个前轮或两个后轮之间出现移动偏差;所述驱动器用于根据所述控制器的控制命令驱动所述车轮;所述位置校核模块用于接收出现报警的图像或视频信息,确定拍摄到出现报警的图像或视频信息的报警摄像头的位置和拍摄角度,并根据所述位置和拍摄角度控制所述复核装置移动到相匹配的位置,并控制拍摄角度相同,进行第一次拍摄,将第一次拍摄的视频或图像与所述报警摄像头的视频或图像进行对比,确定位置和拍摄角度是否相同,如果不同,则重新调整复核装置的位置和拍摄角度,并进行第二次拍摄,将第二次拍摄的视频或图像与所述报警摄像头的视频或图像进行对比,直到位置和拍摄角度相同;如果位置和拍摄角度相同,则确定复核装置中的视频或图像内容是否存在不规范,如果存在,则进行人工干预消除不规范的内容,如果不存在,则检修报警摄像头或人工干扰确认是否存在不规范;所述数据收发模块用于进行数据传输。
8.所述的变电站一键顺控视频双确认系统,所述信息处理装置包括:开关管m4
‑
m6的第一非可控端连接电源vdd,开关管m4的可控端连接开关管m5的可控端、开关管m6的可控端、开关管m7
‑
m8的可控端、开关管m5c的可控端、开关管m6c的可控端、开关管m7c的可控端、开关管m8c的可控端和开关管m4的第二非可控端,开关管m4的第二非可控端连接电流源iset的第一端,电流源iset的第二端接地,开关管m4的基底端连接开关管m4的第一非可控端;开关管m5的第二非可控端分别连接开关管m1的第一非可控端和开关管m13
‑
m14的可控端,开关管m1的第一偏置栅极端和开关管m2的第一偏置栅极端连接电源vdd,开关管m1的控制端接地,开关管m1的第二偏置栅极端连接左前轮检测信号,开关管m1的衬底端连接开关管m2的衬底端、开关管m3的衬底端和开关管m3的第二非可控端,开关管m1的第二非可控端分别连接开关管m2的第二非可控端和开关管m3的第一非可控端,开关管m3的第二非可控端接地,开关管m6的衬底端连接开关管m6的第一非可控端,开关管m6的第二非可控端分别连接开关管m3的可控端和开关管m2的第一非可控端,开关管m2的可控端分别连接电阻rt的第一端、开关管m9的第二非可控端和开关管m11的第一非可控端,开关管m2的第二偏置栅极端连接右前轮检测信号;
9.开关管m7
‑
m8的第一非可控端连接电源vdd,开关管m7的可控端连接开关管m8的可控端,开关管m7的衬底端连接开关管m7的第一非可控端和开关管m9的衬底端,开关管m7的第二非可控端连接开关管m9的第一非可控端,开关管m9的可控端接地,开关管m9的第二非可控端连接开关管m2的控制端和开关管m11的第一非可控端,开关管m11的衬底端连接开关
管m13的衬底端和开关管m13的第二非可控端,开关管m11的可控端连接开关管m12的可控端和电源vdd,开关管m11的第二非可控端连接开关管m13的第一非可控端,开关管m13的可控端连接开关管m14的可控端和开关管m5的第二非可控端,开关管m13的第二非可控端接地,开关管m8的衬底端分别连接开关管m8的第一非可控端和开关管m10的衬底端,开关管m8的第二非可控端连接开关管m10的第一非可控端,开关管m10的第二非可控端连接第一输出端和开关管m12的第一非可控端,开关管m12的衬底端连接开关管m14的衬底端和开关管m14的第二非可控端,开关管m12的第二非可控端连接开关管m14的第一非可控端;
10.开关管m5c
‑
m6c的第一非可控端连接电源vdd,开关管m5c的可控端连接开关管m6c的可控端,开关管m5c的第二非可控端分别连接开关管m1c的第一非可控端和开关管m13c
‑
m14c的可控端,开关管m1c的第一偏置栅极端和开关管m2c的第一偏置栅极端连接电源vdd,开关管m1c的控制端接地,开关管m1c的第二偏置栅极端连接左后轮检测信号,开关管m1c的衬底端连接开关管m2c的衬底端、开关管m3c的衬底端和开关管m3c的第二非可控端,开关管m1c的第二非可控端分别连接开关管m2c的第二非可控端和开关管m3c的第一非可控端,开关管m3c的第二非可控端接地,开关管m6c的衬底端连接开关管m6c的第一非可控端,开关管m6c的第二非可控端分别连接开关管m3c的可控端和开关管m2c的第一非可控端,开关管m2c的可控端分别连接电阻rt的第二端、开关管m9c的第二非可控端和开关管m11c的第一非可控端,开关管m2c的第二偏置栅极端连接右后轮检测信号;
11.开关管m7c
‑
m8c的第一非可控端连接电源vdd,开关管m7c的可控端连接开关管m8c的可控端,开关管m7c的衬底端连接开关管m7c的第一非可控端和开关管m9c的衬底端,开关管m7c的第二非可控端连接开关管m9c的第一非可控端,开关管m9c的可控端接地,开关管m9c的第二非可控端连接开关管m2c的控制端和开关管m11c的第一非可控端,开关管m11c的衬底端连接开关管m13c的衬底端和开关管m13c的第二非可控端,开关管m11c的可控端连接开关管m12c的可控端和电源vdd,开关管m11c的第二非可控端连接开关管m13c的第一非可控端,开关管m13c的可控端连接开关管m14c的可控端和开关管m5c的第二非可控端,开关管m13c的第二非可控端接地,开关管m8c的衬底端分别连接开关管m8c的第一非可控端和开关管m10c的衬底端,开关管m8c的第二非可控端连接开关管m10c的第一非可控端,开关管m10c的第二非可控端连接第二输出端和开关管m12c的第一非可控端,开关管m12c的衬底端连接开关管m14c的衬底端和开关管m14c的第二非可控端,开关管m12c的第二非可控端连接开关管m14c的第一非可控端。
12.本发明提出一种变电站一键顺控视频双确认系统,通过目标位置确定模块、目标行为规范确认模块和对象识别模块,采用级联模型、多任务学习以及滑动窗口平滑统计等方式,实现目标行为以及对象的准确识别,提高了变电站等视频监控的安全性。作为本发明的改进点之一是,对象识别模中采用1.级联模型,为降低因为场站内部设备、背景等造成的误报,我们设计了一个级联模型。图片首先输入到一个轻量而快速的单阶段目标检测模型(yolov4
‑
tiny),该模型只检测画面当中是否有人出现,一旦检测到有人出现,算法将会对画面当中该人体的区域裁剪下来,然后把这块裁剪出来的区域送到第二级模型。第二级模型收到人体剪裁区域后,整体被放大到416x416像素大小,再进行目标检测。此模型一共会输出是否穿安全帽、是否穿工作服、是否穿工作鞋、是否在抽烟打电话等8个标签。这样设计模型的好处是,首先第一级模型就排除了背景的干扰,让模型的注意力集中在人的身上,此
时能极大地降低误报;另外把人体区域剪裁出来后进行了放大,能够更好的看清楚人体的细节,包括工作鞋的类型、手上是否持有香烟、电话等。2.多任务学习,为了检测视频当中是否有人在抽烟打电话,我们设计了一个行为分类网络模型,这个模型是跟1中的级联模型进行联合多任务学习训练的。针对1中的级联模型输出是否在抽烟打电话的目标框之后,我们把这些目标框的特征图缓存下来,总共缓存最近两百帧的结果,然后把这两百帧的特征图分别通过gap(global average polling,全局平均池化)得到每一帧的1x1特征点,此时将会得到一个1x200维度的特征向量,再输入到一个两层的全连接网络输出一个目标是否在打电话的概率。作为本发明的另一改进之处是,本项目基于深度学习目标检测方法实现了自动检测功能:首先,采集槽车、工作人员、防滑垫、警示牌图像,形成数据集,使用深度学习目标检测方法训练,得到可以检测出槽车、工作人员、防滑垫、警示牌等物体的深度学习模型;然后,设计行为规范检测算法,当检测到槽车进入指定区域后,开始检测工作人员、防滑垫、警示牌等物体,如果检测到目标物体出现在指定区域,作业完成。如果在规定时间内没有检测到目标物体,可以认为没有按照规范完成作业,触发报警。
13.2.用于判断目标位置的滑动窗口平滑统计方法
14.在检测作业行为规范时,需要判断车辆是否停留在指定区域/是否离开指定区域。通常,如果视频帧内出现目标,则认为目标存在;反之,如果视频帧内没有目标,则认为目标离开。实际运行中,因跳帧推理、物体运动导致画面不清晰等原因,会出现程序无法检测到视频帧内物体情况。为此,我们应用了滑动窗口平滑统计方法,记录最近若干帧内目标物体出现情况,仅当这些帧内检测到目标的帧的数量超出一定比例后,才认为目标存在,当检测到目标的帧的数量低于一定比例后,认为目标离开。避免了个别帧的错误识别结果影响程序判断。
15.作为本发明的又一改进之处是,设置复核装置,通过复核装置的能够控制针对现场出现报警的信息进行在复核,提高了视频监测的稳定性,通过控制位置校验模块、信息处理装置针对复核装置进行位置移动以及复核信息校对,提高了视频监控的稳定性,通过信息处理装置的具体设计能够快速控制复核装置移动的位置。
附图说明
16.图1为本发明变电站一键顺控视频双确认系统示意图。
17.图2为本发明复核装置的示意图。
18.图3为本发明信息处理装置示意图。
具体实施方式
19.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术作出一些非本质的改进和调整。
20.如图1所示,为本发明公开变电站一键顺控视频双确认系统的示意图,包括摄像头装置、控制装置和警报装置;所述控制装置包括目标位置确定模块、目标行为规范确认模块和对象识别模块;所述目标位置确定模块用于确定目标是否停留在指定区域/是否离开指定区域;所述目标行为规范确认模块用于接收所述目标位置确认模块确定目标在指定区域
后,通过深度学习实现自动检测目标物体,确定目标行为是否规范,如果不规范,则发送信号给所述警报装置触发报警;所述对象识别模块基于级联模型实现对象的安全识别。
21.所述的变电站一键顺控视频双确认系统,所述目标位置确定模块接收所述摄像头装置采集的视频数据,采用滑动窗口平滑统计方法判断目标位置,如果视频帧内出现目标,则认为目标存在;反之,如果视频帧内没有目标,则认为目标离开;通过滑动窗口平滑统计方法,记录最近若干帧内目标物体出现情况,仅当这些帧内检测到目标的帧的数量超出一定比例后,才认为目标存在,当检测到目标的帧的数量低于一定比例后,认为目标离开,能够避免个别帧的错误识别结果影响程序判断。
22.所述的变电站一键顺控视频双确认系统,所述目标行为规范确认模块通过采集槽车、工作人员、防滑垫、警示牌图像,形成数据集,使用深度学习目标检测方法训练,得到检测出槽车、工作人员、防滑垫、警示牌物体的深度学习模型;然后,设计行为规范检测算法,当检测到槽车进入指定区域后,开始检测工作人员、防滑垫、警示牌物体,如果检测到目标物体出现在指定区域,作业完成;如果在规定时间内没有检测到目标物体,可以认为没有按照规范完成作业,发送报警信号给所述警报装置,触发报警。
23.所述的变电站一键顺控视频双确认系统,所述对象识别模块通过级联模型降低因为场站内部设备、背景造成的对象识别的误报,所述级联模型包括第一级模型和第二级模型,所述第一级模型首先输入到一个轻量而快速的单阶段目标检测模型(yolov4
‑
tiny),该模型只检测画面当中是否有人出现,一旦检测到有人出现,算法将会对画面当中该人体的区域裁剪下来,然后把这块裁剪出来的区域送到第二级模型;第二级模型收到人体剪裁区域后,整体被放大到416x416像素大小,再进行目标检测;同构第一级模型就排除了背景的干扰,让模型的注意力集中在人的身上,此时能极大地降低误报;另外把人体区域剪裁出来后进行了放大,能够更好的看清楚人体的细节。
24.如图2所示,为本发明复核装置示意图,所述的变电站一键顺控视频双确认系统,还包括对报警信息进行校核的复核装置,所述复核装置包括四驱移动模块、摄像头、控制器、位置校验模块和数据收发模块;所述复核装置在所述报警装置发出报警信号一定时间内,再次确认是否仍然存在未按照规范的执行的操作,如果存在,在启动所述复核装置,所述复核装置在收到启动信号,开启复核;所述四驱移动模块包括四个驱动器、四个检测器、四个车轮和与检测器连接的信息处理装置,所述检测器用于检测车轮移动的位置信息,所述信息处理装置用于对检测器检测的信号进行处理,以确定四驱的两个前轮或两个后轮之间出现移动偏差;所述驱动器用于根据所述控制器的控制命令驱动所述车轮;所述位置校核模块用于接收出现报警的图像或视频信息,确定拍摄到出现报警的图像或视频信息的报警摄像头的位置和拍摄角度,并根据所述位置和拍摄角度控制所述复核装置移动到相匹配的位置,并控制拍摄角度相同,进行第一次拍摄,将第一次拍摄的视频或图像与所述报警摄像头的视频或图像进行对比,确定位置和拍摄角度是否相同,如果不同,则重新调整复核装置的位置和拍摄角度,并进行第二次拍摄,将第二次拍摄的视频或图像与所述报警摄像头的视频或图像进行对比,直到位置和拍摄角度相同;如果位置和拍摄角度相同,则确定复核装置中的视频或图像内容是否存在不规范,如果存在,则进行人工干预消除不规范的内容,如果不存在,则检修报警摄像头或人工干扰确认是否存在不规范;所述数据收发模块用于进行数据传输。
25.如图3所示,为本发明信息处理装置示意图;所述的变电站一键顺控视频双确认系统,所述信息处理装置包括:开关管m4
‑
m6的第一非可控端连接电源vdd,开关管m4的可控端连接开关管m5的可控端、开关管m6的可控端、开关管m7
‑
m8的可控端、开关管m5c的可控端、开关管m6c的可控端、开关管m7c的可控端、开关管m8c的可控端和开关管m4的第二非可控端,开关管m4的第二非可控端连接电流源iset的第一端,电流源iset的第二端接地,开关管m4的基底端连接开关管m4的第一非可控端;开关管m5的第二非可控端分别连接开关管m1的第一非可控端和开关管m13
‑
m14的可控端,开关管m1的第一偏置栅极端和开关管m2的第一偏置栅极端连接电源vdd,开关管m1的控制端接地,开关管m1的第二偏置栅极端连接左前轮检测信号,开关管m1的衬底端连接开关管m2的衬底端、开关管m3的衬底端和开关管m3的第二非可控端,开关管m1的第二非可控端分别连接开关管m2的第二非可控端和开关管m3的第一非可控端,开关管m3的第二非可控端接地,开关管m6的衬底端连接开关管m6的第一非可控端,开关管m6的第二非可控端分别连接开关管m3的可控端和开关管m2的第一非可控端,开关管m2的可控端分别连接电阻rt的第一端、开关管m9的第二非可控端和开关管m11的第一非可控端,开关管m2的第二偏置栅极端连接右前轮检测信号;
26.开关管m7
‑
m8的第一非可控端连接电源vdd,开关管m7的可控端连接开关管m8的可控端,开关管m7的衬底端连接开关管m7的第一非可控端和开关管m9的衬底端,开关管m7的第二非可控端连接开关管m9的第一非可控端,开关管m9的可控端接地,开关管m9的第二非可控端连接开关管m2的控制端和开关管m11的第一非可控端,开关管m11的衬底端连接开关管m13的衬底端和开关管m13的第二非可控端,开关管m11的可控端连接开关管m12的可控端和电源vdd,开关管m11的第二非可控端连接开关管m13的第一非可控端,开关管m13的可控端连接开关管m14的可控端和开关管m5的第二非可控端,开关管m13的第二非可控端接地,开关管m8的衬底端分别连接开关管m8的第一非可控端和开关管m10的衬底端,开关管m8的第二非可控端连接开关管m10的第一非可控端,开关管m10的第二非可控端连接第一输出端和开关管m12的第一非可控端,开关管m12的衬底端连接开关管m14的衬底端和开关管m14的第二非可控端,开关管m12的第二非可控端连接开关管m14的第一非可控端;
27.开关管m5c
‑
m6c的第一非可控端连接电源vdd,开关管m5c的可控端连接开关管m6c的可控端,开关管m5c的第二非可控端分别连接开关管m1c的第一非可控端和开关管m13c
‑
m14c的可控端,开关管m1c的第一偏置栅极端和开关管m2c的第一偏置栅极端连接电源vdd,开关管m1c的控制端接地,开关管m1c的第二偏置栅极端连接左后轮检测信号,开关管m1c的衬底端连接开关管m2c的衬底端、开关管m3c的衬底端和开关管m3c的第二非可控端,开关管m1c的第二非可控端分别连接开关管m2c的第二非可控端和开关管m3c的第一非可控端,开关管m3c的第二非可控端接地,开关管m6c的衬底端连接开关管m6c的第一非可控端,开关管m6c的第二非可控端分别连接开关管m3c的可控端和开关管m2c的第一非可控端,开关管m2c的可控端分别连接电阻rt的第二端、开关管m9c的第二非可控端和开关管m11c的第一非可控端,开关管m2c的第二偏置栅极端连接右后轮检测信号;
28.开关管m7c
‑
m8c的第一非可控端连接电源vdd,开关管m7c的可控端连接开关管m8c的可控端,开关管m7c的衬底端连接开关管m7c的第一非可控端和开关管m9c的衬底端,开关管m7c的第二非可控端连接开关管m9c的第一非可控端,开关管m9c的可控端接地,开关管m9c的第二非可控端连接开关管m2c的控制端和开关管m11c的第一非可控端,开关管m11c的
衬底端连接开关管m13c的衬底端和开关管m13c的第二非可控端,开关管m11c的可控端连接开关管m12c的可控端和电源vdd,开关管m11c的第二非可控端连接开关管m13c的第一非可控端,开关管m13c的可控端连接开关管m14c的可控端和开关管m5c的第二非可控端,开关管m13c的第二非可控端接地,开关管m8c的衬底端分别连接开关管m8c的第一非可控端和开关管m10c的衬底端,开关管m8c的第二非可控端连接开关管m10c的第一非可控端,开关管m10c的第二非可控端连接第二输出端和开关管m12c的第一非可控端,开关管m12c的衬底端连接开关管m14c的衬底端和开关管m14c的第二非可控端,开关管m12c的第二非可控端连接开关管m14c的第一非可控端。
29.输配公司燃气运送过程有以下作业规范:(1)槽车驶入场站前,场站工作人员需围绕槽车行走一周检查车辆状况(2)槽车停止在装车区后,执行装车卸车作业前,场站工作人员需要在车轮处放置防滑垫,放置车辆意外移动(3)槽车停止在卸车区后,执行装车卸车作业前,场站工作人员需要在车辆前方放置警示牌,提示无关人员不得靠近。
30.本发明研究实现了通过摄像机视频智能分析自动判断工作人员是否依照规范作业,检测到未依照规范作业时,发送报警信息。
31.本发明提出一种变电站一键顺控视频双确认系统,通过目标位置确定模块、目标行为规范确认模块和对象识别模块,采用级联模型、多任务学习以及滑动窗口平滑统计等方式,实现目标行为以及对象的准确识别,提高了变电站等视频监控的安全性。作为本发明的改进点之一是,对象识别模中采用1.级联模型,为降低因为场站内部设备、背景等造成的误报,我们设计了一个级联模型。图片首先输入到一个轻量而快速的单阶段目标检测模型(yolov4
‑
tiny),该模型只检测画面当中是否有人出现,一旦检测到有人出现,算法将会对画面当中该人体的区域裁剪下来,然后把这块裁剪出来的区域送到第二级模型。第二级模型收到人体剪裁区域后,整体被放大到416x416像素大小,再进行目标检测。此模型一共会输出是否穿安全帽、是否穿工作服、是否穿工作鞋、是否在抽烟打电话等8个标签。这样设计模型的好处是,首先第一级模型就排除了背景的干扰,让模型的注意力集中在人的身上,此时能极大地降低误报;另外把人体区域剪裁出来后进行了放大,能够更好的看清楚人体的细节,包括工作鞋的类型、手上是否持有香烟、电话等。2.多任务学习,为了检测视频当中是否有人在抽烟打电话,我们设计了一个行为分类网络模型,这个模型是跟1中的级联模型进行联合多任务学习训练的。针对1中的级联模型输出是否在抽烟打电话的目标框之后,我们把这些目标框的特征图缓存下来,总共缓存最近两百帧的结果,然后把这两百帧的特征图分别通过gap(global average polling,全局平均池化)得到每一帧的1x1特征点,此时将会得到一个1x200维度的特征向量,再输入到一个两层的全连接网络输出一个目标是否在打电话的概率。作为本发明的另一改进之处是,本项目基于深度学习目标检测方法实现了自动检测功能:首先,采集槽车、工作人员、防滑垫、警示牌图像,形成数据集,使用深度学习目标检测方法训练,得到可以检测出槽车、工作人员、防滑垫、警示牌等物体的深度学习模型;然后,设计行为规范检测算法,当检测到槽车进入指定区域后,开始检测工作人员、防滑垫、警示牌等物体,如果检测到目标物体出现在指定区域,作业完成。如果在规定时间内没有检测到目标物体,可以认为没有按照规范完成作业,触发报警。
32.2.用于判断目标位置的滑动窗口平滑统计方法
33.在检测作业行为规范时,需要判断车辆是否停留在指定区域/是否离开指定区域。
通常,如果视频帧内出现目标,则认为目标存在;反之,如果视频帧内没有目标,则认为目标离开。实际运行中,因跳帧推理、物体运动导致画面不清晰等原因,会出现程序无法检测到视频帧内物体情况。为此,我们应用了滑动窗口平滑统计方法,记录最近若干帧内目标物体出现情况,仅当这些帧内检测到目标的帧的数量超出一定比例后,才认为目标存在,当检测到目标的帧的数量低于一定比例后,认为目标离开。避免了个别帧的错误识别结果影响程序判断。
34.作为本发明的又一改进之处是,设置复核装置,通过复核装置的能够控制针对现场出现报警的信息进行在复核,提高了视频监测的稳定性,通过控制位置校验模块、信息处理装置针对复核装置进行位置移动以及复核信息校对,提高了视频监控的稳定性,通过信息处理装置的具体设计能够快速控制复核装置移动的位置。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种电网污染源远程治理装置的...
- 一种用于电力系统精准治理的装...
- 一种结合超短期预测和区域控制...
- 一种电机转子压钉调节装置的制...
- 用于保持线缆的装置及方法与流...
- 一种循环充电系统的制作方法
- 多功能布线伸缩支架装置的制作...
- 一种基于哈里斯鹰算法的三相并...
- 工井电力电缆自动引导机器人的...
- 一种全双工无线电能与信号混合...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1