基于数据驱动的通用动态矩阵控制系统及控制方法
1.本发明涉及工业过程控制,具体是一种基于数据驱动的通用动态矩阵控制系统及控制方法。
背景技术:
2.基于预测控制的一般框架,不同的模型形式,优化策略和反馈方法会形成不同的预测控制算法。其中,动态矩阵控制(以下简称为dmc)算法是一种以对象阶跃响应作为预测模型,结合滚动优化与反馈校正共同实施的优化控制算法。由于该算法具有复杂度低、鲁棒性强等特点,自预测控制兴起时就在冶金、化工等工业过程控制中得到了十分广泛的应用。
3.dmc算法需要建立阶跃响应模型需要耗费较长的建模周期,尤其对于动态比较缓慢的系统,会导致更高的建模成本代价。因此,如何简化建模的步骤,缩短建模周期,并有效解决模型不准确引发的误差从而建立一个通用的动态矩阵控制方法是一个需要解决的问题。
技术实现要素:
4.本发明的目的在于提出一种基于数据驱动的通用的动态矩阵控制系统及控制方法,以简化建模过程,降低成本,并利用数据驱动的思想有效解决建模不准确对控制性能的影响。
5.本发明采用以下方案实现:
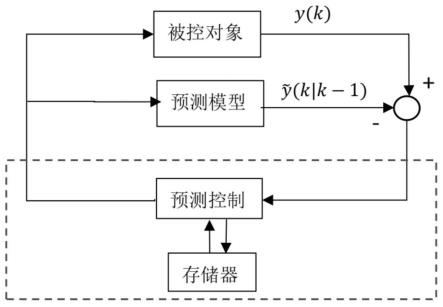
6.一种基于数据驱动的通用动态矩阵控制系统包括传感器、存储器、预测控制器模块,其中:传感器与被控对象相连用以检测实际输出信号,且传感器的输出端与预测模型的预测输出求差,将误差传输至预测控制模块,存储器与预测控制模块连接,将存储的历史数据送至预测控制模块求解优化问题,预测控制模块与存储器连接更新历史数据,与被控对象相连接输出控制策略,所述的传感器经模拟量输入通道与工控机相连。
7.本发明利用基于数据驱动的通用动态矩阵控制系统的控制方法,其特征在于该方法包括以下步骤:
8.1)建立简化的预测模型:测定动态类似的系统简化模型的单位阶跃响应的采样值fi=f(it),其中t为采样周期,假设当tn=nt后阶跃响应将趋于平稳,则利用模型向量f=[f
1 f2ꢀ…ꢀfn
]
t
描述简化模型的动态信息。设定预测时域为p,控制时域为m,历史数据长度为nd,f为动态类似的简化模型的阶跃响应系数fi组成的动态矩阵,在工控机中建立预测模型如下
[0009][0010]
其中,y
pm
(k)为未来p个时刻的输出预测值,y
p0
(k)为初始预测值,y
p0
(k-i)为储存的初始预测值的历史值,为储存的实际输出反馈校正过后的历史预测输出序列,其中向量y的前一个下标表示所预测的未来输出的个数,后一个下标则为控制量变化的次
数,δ
u,m
(k)=[δu(k) δu(k+1)
ꢀ…ꢀ
δu(k+m)]为控制向量的余增量项。g
p
为与y
p0
(k-i),和可调参数a相关的向量函数。
[0011]
2)工控机根据采样周期,在k时刻发布采样命令,传感器对被控对象的输出变量y(k)进行检测,检测的信号通过模拟量输入通道经a/d转换后,输送到工控机中。
[0012]
3)工控机依据第二步检测得到的系统输出,求解优化问题。选择优化问题的目标函数如下:
[0013][0014]
其中输入输出满足相应的物理约束且
[0015]wp
(k)=[w(k+1) w(k+2)
ꢀ…ꢀ
w(k+p)],
[0016]
q=diag(q1,...q
p
),r=diag(r1,...rm).
[0017]
将第一步的y
pm
(k)代入目标函数中,求解该优化问题可得k时刻控制量的余增量项为δu(k),进一步得控制增量为
[0018][0019]
其中a为历史数据参数,δu(k-i)为存储器储存的历史控制增量。计算k时刻的实际控制量u(k)=u(k-1)+δu(k),将u(k)作用于被控对象,并将其储存于存储器中更新存储的历史数据以备未来时刻的求解。到下一时刻,以k+1取代k求出u(k+1)作用于对象,同时将其储存于存储器中。
[0020]
4)利用实时信息进行反馈校正:在k时刻,在对象输入端加上一个幅值为δu(k)的输入后,在其作用下未来n个时刻的输出预测值为:
[0021][0022]
其中gn为与历史数据y
n0
(k-i)和以及参数a相关的向量函数。检测被控对象k+1时刻的实际输出y(k+1),与k时刻预测的k+1时刻的输出比较得到输出误差利用e(k+1)修正对未来输出的预测得其中h=[h
1 h2ꢀ…ꢀhn
]
t
为校正向量,将储存于存储器中更新存储的历史数据以备未来时刻的求解。通过移位可得k+1时刻的初始预测值为其中
[0023][0024]
为移位矩阵,同样,将y
n0
(k+1)储存于存储器中更新存储的历史数据,从而基于步骤1)-3)继续进行k+1时刻的优化计算得到u(k+1)作用于被控对象。
[0025]
5)将优化计算的结果输入被控对象,选择参数a以调节系统的控制性能:参数a∈[0,1],当a=0时,控制结果与dmc相同,当a>0且逐渐增大时,系统的控制性能逐渐提升,但当a取的太大则会产生抖动,因此,应该合理调节参数a的值,即在[0,1]范围内逐步增大a的
值,当获得较好的控制效果时即可选当前值,若产生抖动则取之前控制效果较好的a值的最大值。
[0026]
本发明提出一种基于数据驱动的具有性能保证的通用动态矩阵控制系统及控制方法,可以有效地解决dmc建模耗时长的问题,引入的数据驱动方法可以有效地保证系统的控制性能,具有较高的实用价值。
附图说明
[0027]
构成本发明的一部分的说明书附图用来提供对本技术的进一步理解,本发明的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
[0028]
图1是本发明的控制系统框图;
[0029]
图2是本发明的控制方法框图;
[0030]
图3是本发明实施例的系统1的输出y的响应曲线;
[0031]
图4是本发明实施例的系统2的输出y的响应曲线;
具体实施方式
[0032]
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0033]
如图1所示,本实施例基于数据驱动的动态矩阵控制系统包括传感器、存储器、预测控制器模块,其中:传感器与被控对象相连用以检测实际输出信号,且传感器的输出端与预测模型的预测输出相比较,将误差传输至预测控制模块,存储器与预测控制模块连接,将存储的历史数据送至预测控制模块求解优化问题,预测控制模块与存储器连接更新历史数据,与被控对象相连接输出控制策略,所述的传感器经模拟量输入通道与工控机相连。
[0034]
本发明涉及的控制方法包括以下步骤:
[0035]
针对本实施例,取预测控制的预测时域为p=10,控制时域为m=1,采样周期为t=0.1,n=40,历史数据长度为nd=1,n维反馈校正向量为h=[1 1
ꢀ…ꢀ
1]
t
。
[0036]
本实施例包括如下步骤:
[0037]
第一步、建立简化的预测模型:考虑两个一阶惯性被控对象,并分别给出相应的动态类似的系统简化模型如下:
[0038][0039]
分别测定两个预测模型的模型向量如下:
[0040][0041]
[0042]
即令采样周期为t=0.1,取阶跃响应的前40个采样值形成模型向量。由p=10,m=1,可得预测模型阶跃响应矩阵f1为f1的前10个分量组成的向量,f2为f2的前10个分量组成的向量,建立预测模型如下:
[0043][0044]
其中,y
pm
(k)为未来p个时刻的输出预测值,y
p0
(k)为初始预测值,y
p0
(k-i)为储存的初始预测值的历史值,为储存的实际输出反馈校正过后的历史预测输出序列,其中向量y的前一个下标表示所预测的未来输出的个数,后一个下标则为控制量变化的次数,δ
u,m
(k)=[δu(k) δu(k+1)
ꢀ…ꢀ
δu(k+m)]为控制向量的余增量项,依据参数a的取值范围将向量函数g
p
中的参数a取为0.5;
[0045]
第二步、工控机根据采样周期,在k时刻发布采样命令,传感器对被控对象(即工业控制系统)的实际输出变量进行检测,将检测的信号y(k)通过模拟量输入通道经a/d转换后,输送到工控机中;
[0046]
第三步、工控机依据第二步检测得到的系统实际输出y(k),求解优化问题:
[0047]
选择优化问题的目标函数如下:
[0048][0049]
其中,输入输出满足相应的物理约束且
[0050]wp
(k)=[1 1
ꢀ…ꢀ
1],
[0051]
q=diag(1,1,...1),r=diag(0.1,0.1,...0.1).
[0052]
将第一步的y
pm
(k)代入目标函数中,求解该优化问题,得到k时刻控制量的余增量项为δu(k),进一步得控制增量为:
[0053][0054]
其中,历史数据参数的a为0.5,δu(k-i)为存储器储存的历史控制增量。计算k时刻的实际控制量:u(k)=u(k-1)+δu(k),将u(k)作用于被控对象,并将其储存于存储器中更新存储的历史数据以备未来时刻的求解。到下一时刻,以k+1取代k求出u(k+1)作用于对象,同时将其储存于存储器中。
[0055]
第四步、利用实时信息进行反馈校正:
[0056]
在k时刻,在对象输入端加上一个幅值为δu(k)的输入后,在其作用下未来40个时刻的输出预测值为:
[0057][0058]
其中,向量函数gn中的参数a取为0.5,检测被控对象k+1时刻的实际输出y(k+1),与k时刻预测的k+1时刻的输出比较得到输出误差:利用e(k+1)修正对未来输出的预测得其中h=[1 1
ꢀ…ꢀ
1]
t
为校正向量,将储存于存储器中并更新存储的历史数据以备未来时刻的求解;通过移位可得k+1时刻的初始预测值为
其中
[0059][0060]
为移位矩阵,同样,将y
n0
(k+1)储存于存储器中更新存储的历史数据,从而基于步骤1)-3)继续进行k+1时刻的优化计算得到u(k+1)作用于被控对象。
[0061]
通过以上步骤,本发明基于数据驱动的通用动态矩阵控制方法可以针对动态相似的简化模型,利用数据驱动方法实时更新并反馈系统的历史数据,从而降低模型误差产生的影响,且可以通过调节历史数据的参数a改变历史数据所占的比重,从而提升系统的控制性能。因此,该方法可以有效缩短建模周期,且可以达到更好的控制效果,这对于工业过程控制系统具有重要的意义。
[0062]
令初始值均为零,通过实际被控对象的输出响应来展示控制结果。图3为系统1的输出响应,即实际被控对象的时间常数大于预测模型的时间常数(实际被控对象的响应速度更慢)。图4为系统2的输出响应,即实际被控对象与预测模型的时间常数与增益均不同(即对象与模型之间的误差较大)。由两个图可以看出,当实际被控对象的响应速度比较慢时,令历史数据的参数a取值为0.5,本实施例方法的应用比dmc响应速度更快。当预测模型与实际被控对象的误差较大时,依然可以通过调节历史数据的参数有效补偿误差对控制性能造成的影响,当a取值为0.5时,本实施例方法的应用同样比dmc响应速度更快。因此,本实施例所提出的基于数据驱动的通用动态矩阵控制系统及控制方法对比dmc,能通过调节参数a更有效地提升系统性能。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 数字化智能配电模块及其配电方...
- 基于实例及规则推理的数控自动...
- 一种诊断故障码管理方法及系统...
- 机器人乘梯方法、装置、服务器...
- 车载影音播放的控制方法、控制...
- 工序管理系统及工序管理方法与...
- 一种电源电压控制方法、装置、...
- 双边力反馈方法、装置、设备及...
- 通信设备及远程监控系统的制作...
- 一种基于大数据分析的事故预警...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1